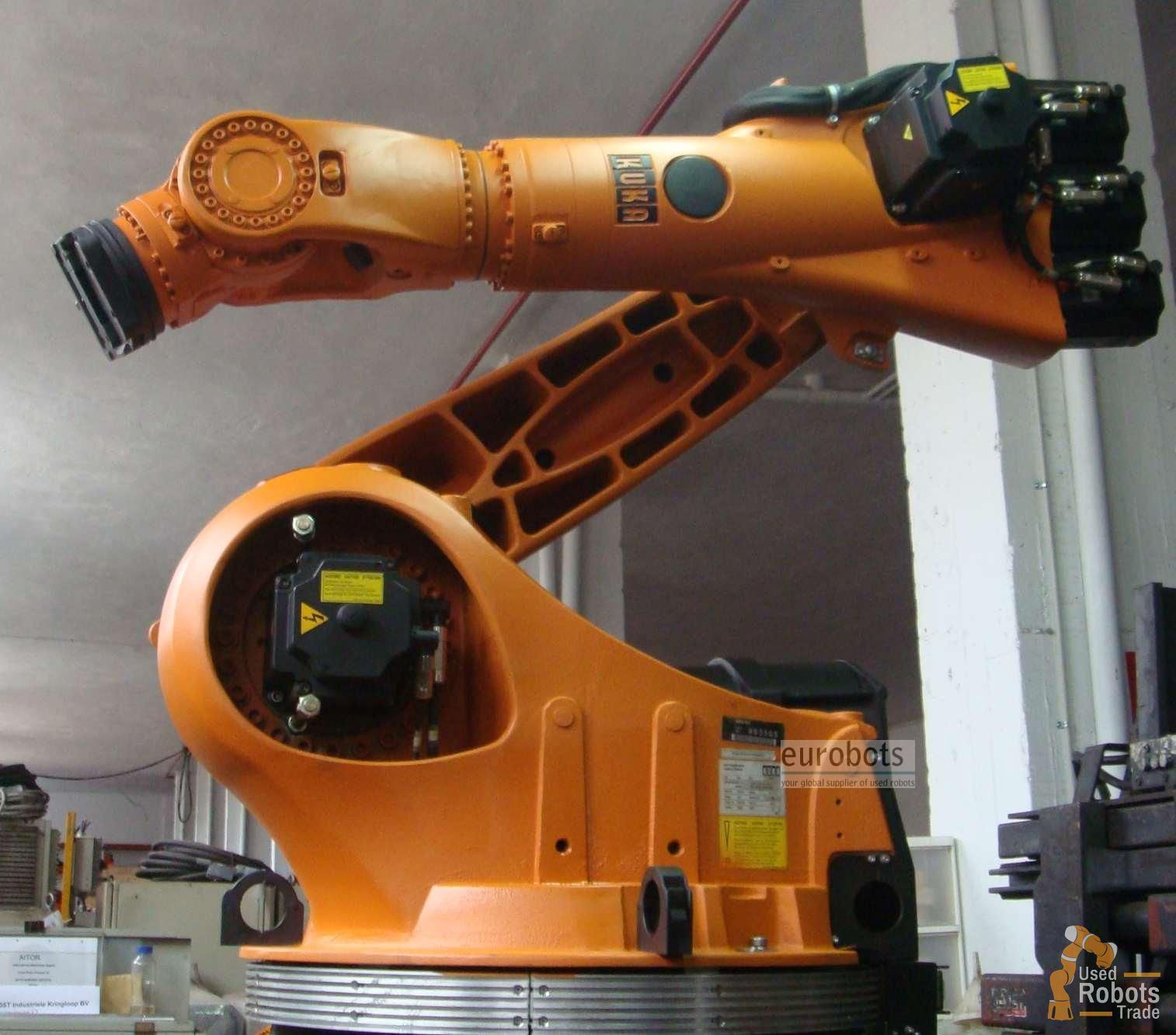
KUKA KR210 VKRC2 control
Detalhes do robô
Anos 2001-2002. Em torno de 8000-10000 horas de trabalho. Robô de carga elevada para uso geral.Este robô é essencialmente o mesmo que o KR210 série 2000 com o controlador padrão KRC2. A diferença está no controlador que possui um software Kuka versão 3.3.4 projetado para o grupo VW. O hardware do gabinete de controle é quase idêntico e a filosofia e o ambiente da programação são executados da mesma maneira.
Diferenças entre a programação KRC2 e VKRC2
Sistema de controle "padrão KRC2"
A principal característica é que todo o sistema é aberto desde o início, podemos lidar com opções para programação estão abertas a qualquer programador em dois níveis:
Nome de usuário:
Nível de programação padrão que nos permite calcular as ferramentas de trabalho e bases carregadas como calibração externa do robô, desenvolver programas, modificar, duplicar, deletar, etc.
Também neste nível pode modificar as variáveis definidas no programa e visualizar entradas de ativação de saída.
Especialista:
Este nível é definido como avançado, todas as opções estão abertas para o programador, neste caso, a criação de programas é excluída, alternativamente, você pode editar os programas projetados para introduzir os códigos de programa.
É nesse nível que os drivers também são configurados para comunicação com a periferia.
Todos os programas criados com este sistema, os nomes são feitos com o desenvolvedor considera apropriado para cada função executar
"Grab_part", "lift_fixer" etc ...
A gestão de programas "mainstream" pode ser feita através do programa "Cell", ligado a uma linha PLC, e todos os programas podem ser ligados entre si.
Sistema de controle "VKRC2 VW"
Este sistema é configurado com a Volkswagen para o trabalho automotivo.
A principal característica é a facilidade de programação e o rápido diagnóstico do sistema.
No sistema VKRC2 modos também são usuário e especialista, mas aqui tudo pode ser feito do nível de usuário. O acesso de nível de especialista é feito com uma chave.
A programação é feita em menos tempo, porque a principal característica da introdução do código, isso é feito com diferentes opções que estão aparecendo nas teclas, dependendo das opções que temos, em resumo, nenhum mal pode entrar no código de programação. Obviamente, o sistema não informa se adicionarmos instruções é apropriado.
Exemplo: (OUT "56" TRUE), quando talvez fosse necessário naquele momento (OUT "56" FALSE)
Programas que podem ser usados com este sistema e possuem uma estrutura definida.
Folge : Estes programas são gerenciados através de externo automatizado e só podem ser chamados por um autômato.
Up : Sub com movimento que só pode ser chamado de um ou outro Up Folge
Makro : Sub nenhum movimento que pode ser chamado de um Folge, um Up ou outro Makro.
Com este sistema, perdemos a capacidade de calcular bases
Isso poderia ser resolvido de forma diferente com três pontos definidos no banco de dados e tratá-los como se fossem uma ferramenta externa.
Depois de calcular a ferramenta, calculamos o ponto para qualquer ponto da base para calcular e as coordenadas cartesianas resultantes seriam esse ponto específico.
Em suma
O sistema VKRC2 é mais rápido de programar, mas perde a eficácia para aplicações que requerem programação específica.
É um sistema criado para funcionar com um padrão definido, que é definido
O sistema KRC2 dá mais jogo à programação, todas as possibilidades são abertas e isso é importante para instalações que diferem muito umas das outras.
De qualquer forma, a programação no modo expert é exatamente a mesma com ambos os sistemas e tanto as características de desempenho quanto a manipulação e os resultados finais são idênticos.
Este é o mesmo robô com a capacidade de agendar uma de duas maneiras:
VKRC2 mais rápido.
KRC2 mais versátil.
Aplicações robóticas
- Assistência à imprensa
- Carga e descarga de peças
- Usinagem
- Manuseio de peças
- Soldagem a arco
- Spotwelding
- Paletização
- Soldagem a laser Nd-Yag
- Colagem - colagem adesiva
- Soldagem de pinos
Informação do Robô:
- Carga Máxima do Robô: 150/180 / 210Kg.
- Alcance máximo: 2700/2900/3100 mm.
- Repetibilidade: 0,15-0,2 mm.
- Controlador: Versão do software VKR C2 3.3.4
Velocidade do movimento do robô:
- Eixo 1: 105º/seg
- Eixo 2: 110º/seg
- Eixo 3: 95º/seg
- Eixo 4: 170º/seg
- Eixo 5: 170º/seg
- Eixo 6: 238º/seg
Aplicações Robô:
- Usinagem
- Machine tending
- Polimento, moagem e rebarbação
- Revestimento e colagem
- Manipulação
- Medindo e testando
- Montagem
- Paletização e separação de pedidos
- Corte
- Soldagem



{kind=link}
{kind=link}
{kind=link}