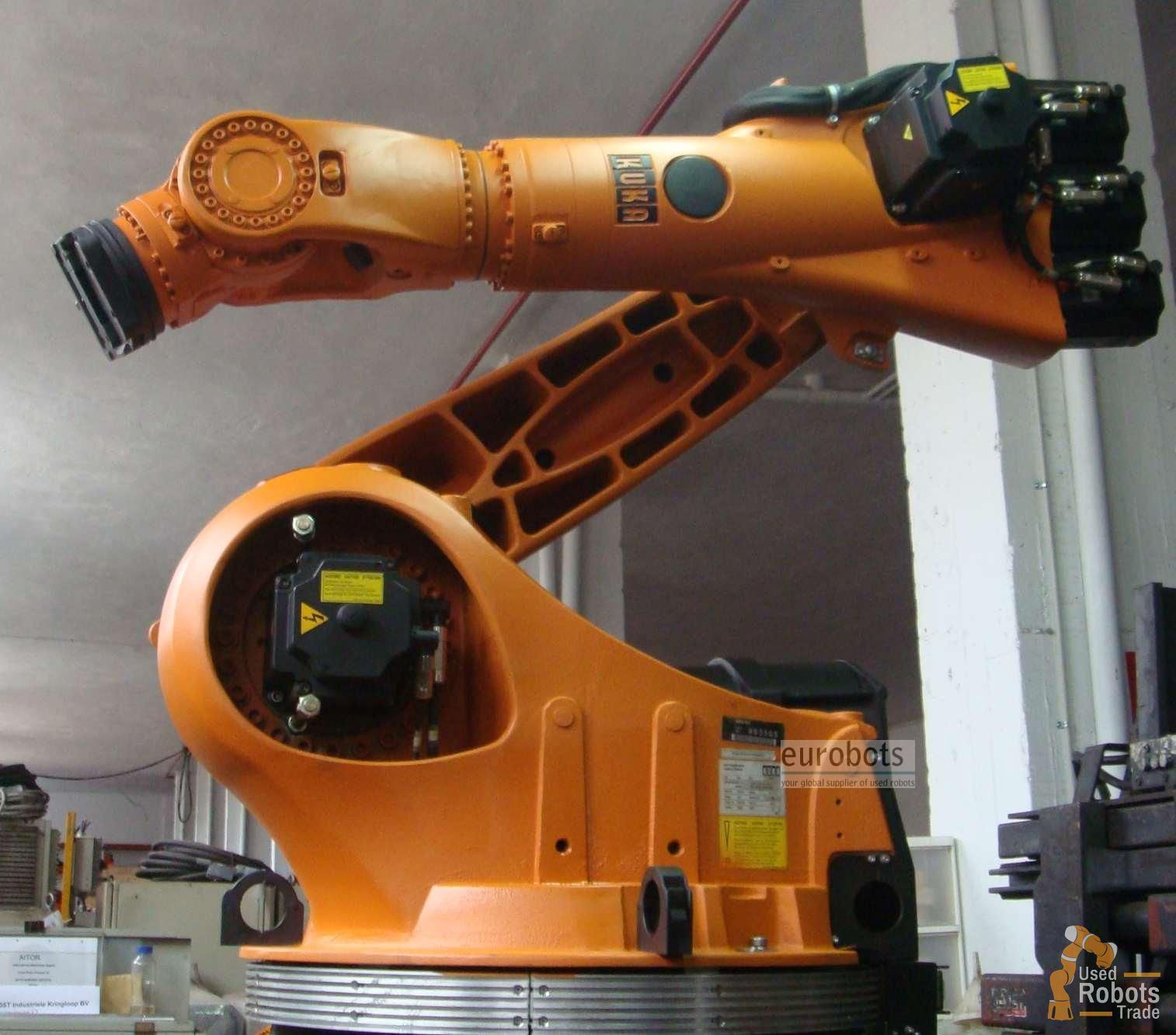
KUKA KR210 VKRC2 control
Detalles del robot
Años 2001-2002. Alrededor de 8000-10000 horas de trabajo. Robot de carga alta para uso general. Este robot es esencialmente el mismo que el KR210 serie 2000 con controlador estándar KRC2. La diferencia radica en el controlador que tiene una versión del software Kuka 3.3.4 diseñada para el grupo VW. El hardware del gabinete de control es casi idéntico y la filosofía y el entorno de la programación se ejecutan de la misma manera.
Diferencias entre la programación KRC2 y VKRC2
Sistema de control "estándar KRC2"
La característica principal es que todo el sistema está abierto desde el principio, podemos manejar las opciones de programación que están abiertas a cualquier programador en dos niveles:
Nombre de usuario:
Nivel de programación predeterminado que nos permite calcular las herramientas de trabajo y las bases cargadas como calibración externa del robot, desarrollar programas, modificar, duplicar, eliminar, etc.
También en este nivel puede modificar las variables definidas en el programa y ver las entradas de habilitación de salida.
Experto:
Este nivel se define como avanzado, todas las opciones están abiertas para el programador, en este caso, se excluye la creación de programas, alternativamente, puede editar los programas diseñados para introducir los códigos del programa.
Es en este nivel donde los controladores también están configurados para la comunicación con la periferia.
Todos los programas son creados con este sistema, los nombres se crean con el desarrollador que considere apropiado para cada función.
"Grab_part", "lift_fixer", etc.
La gestión de los programas "convencionales" se puede realizar a través del programa "Célula" vinculado a una línea de PLC y todos los programas pueden vincularse entre ellos.
Sistema de control "VKRC2 VW"
Este sistema está configurado con Volkswagen para el trabajo automotriz.
La característica principal es la facilidad de programación y el diagnóstico rápido del sistema.
En el sistema, los modos VKRC2 también son usuarios y expertos, pero aquí todo se puede hacer desde el nivel de usuario. El acceso de nivel experto se realiza con una clave.
La programación se realiza en menos tiempo debido a que la característica principal de introducción de código, esto se hace con diferentes opciones que están apareciendo en las teclas de función de las opciones que tenemos, en definitiva, ningún mal puede entrar en el código de programación. Obviamente, el sistema no le dice si agregamos las instrucciones apropiadas
Ejemplo: (OUT "56" TRUE), cuando tal vez sería necesario en ese momento (OUT "56" FALSE)
Programas que se pueden usar con este sistema y que tienen una estructura definida.
Folge : estos programas se administran a través de un sistema externo automatizado y solo pueden ser llamados por un autómata.
Up : Sub con movimiento que solo se puede invocar desde una u otra Up Folge
Makro : Sub sin movimiento que puede ser llamado desde un Folge, un Up u otro Makro.
Con este sistema, perdemos la capacidad de calcular bases
Esto podría resolverse de manera diferente con tres puntos definidos en la base de datos y tratarlos como si fueran una herramienta externa.
Después de calcular la herramienta, calculamos el punto a cualquier punto de la base para calcular y las coordenadas cartesianas resultantes serían ese punto particular.
En resumen
El sistema VKRC2 es más rápido de programar, pero pierde efectividad para aplicaciones que requieren programación específica.
Es un sistema creado para trabajar con un estándar definido que está todo listo
El sistema KRC2 da más juego a la programación, todas las posibilidades están abiertas y eso es importante para las instalaciones que difieren mucho entre sí.
De todos modos, la programación en el modo experto es exactamente igual con ambos sistemas y con las características de rendimiento, ya que el manejo y los resultados finales son idénticos.
Este es el mismo robot con la capacidad de programar una de dos maneras:
VKRC2 más rápido.
KRC2 más versátil.
Aplicaciones robotizadas
- Prensa tendiendo
- Carga y descarga de piezas
- Mecanizado
- Manipulación de piezas
- Soldadura por arco
- Soldadura de punto
- Paletización
- Soldadura láser Nd-Yag
- Pegado - Pegado adhesivo
- Soldadura de pernos
Información del robot:
- Carga máxima de Robot: 150/180 / 210Kg.
- Alcance máximo: 2700/2900/3100 mm.
- Repetibilidad: 0.15-0.2 mm.
- Controlador: versión del software VKR C2 3.3.4
Velocidad de movimiento del robot:
- Eje 1: 105º/seg
- Eje 2: 110º/seg
- Eje 3: 95º/seg
- Eje 4: 170º/seg
- Eje 5: 170º/seg
- Eje 6: 238º/seg
Aplicaciones del Robot:
- Mecanizado
- Asistencia a máquinas
- Pulido, rectificado y desbarbado
- Recubrimiento y unión
- Manejo
- Medición y prueba
- Montaje
- Paletizado y preparación de pedidos
- Corte
- Soldadura



{kind=link}
{kind=link}
{kind=link}