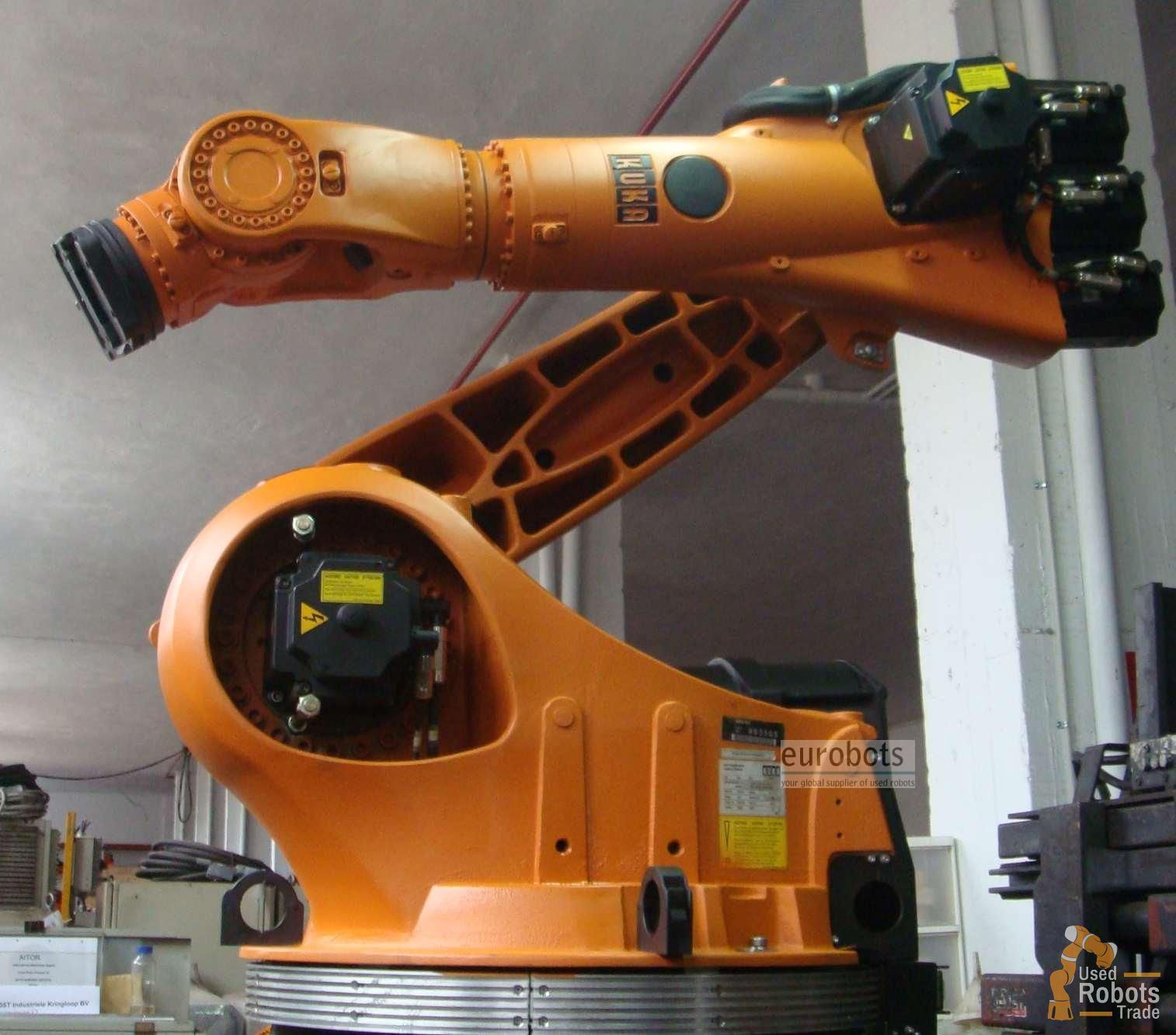
KUKA KR210 VKRC2 control
Детали робота
Годы 2001-2002 гг. Около 8000-10000 рабочих часов. Высокий робот полезной нагрузки для общего назначения. Этот робот по существу тот же, что и серия KR210 2000 с стандартным контроллером KRC2. Разница заключается в контроллере, который содержит версию программного обеспечения Kuka 3.3.4, предназначенную для группы VW. Аппаратное обеспечение шкафа управления почти идентично, и философия и среда программирования работают одинаково.
Различия между программированием KRC2 и VKRC2
Система управления «стандарт KRC2»
Основная особенность заключается в том, что вся система открыта с самого начала, мы можем обрабатывать варианты программирования, которые открыты для любого программиста на двух уровнях:
Имя пользователя:
Уровень программирования по умолчанию, который позволяет нам рассчитывать рабочие инструменты и базы, загружаемые как внешнюю калибровку робота, разрабатывать программы, изменять, дублировать, удалять и т. Д.
Также на этом уровне можно изменить переменные, определенные в программе, и просмотреть входы разрешения вывода.
Эксперт:
Этот уровень определяется как расширенный, все опции открыты для программиста, в этом случае исключается создание программ, в качестве альтернативы вы можете редактировать программы, предназначенные для введения программных кодов.
Именно на этом уровне драйверы также настроены для связи с периферией.
Все программы, созданные с помощью этой системы, имена создаются вместе с разработчиком, который считается подходящим для каждой роли.
«Grab_part», «lift_fixer» и т. Д. ...
Управление «основными» программами может осуществляться через программу «Ячейка», связанную с линией ПЛК, и все программы могут быть связаны между собой.
Система управления "VKRC2 VW"
Эта система настроена на Volkswagen для автомобильной работы.
Главная особенность - простота программирования и быстрая диагностика системы.
В системе режимы VKRC2 также являются пользователями и экспертами, но здесь все можно сделать с пользовательского уровня. Доступ на уровне эксперта осуществляется с помощью ключа.
Программирование выполняется за меньшее время, потому что основная особенность введения кода - это делается с различными параметрами, которые появляются на клавишах в зависимости от параметров, которые у нас есть, короче говоря, никакое зло не может войти в код программирования. Очевидно, что система не говорит вам, если мы добавим инструкции.
Пример: (OUT "56" TRUE), когда, возможно, это было необходимо в это время (OUT "56" FALSE)
Программы, которые можно использовать с этой системой и иметь определенную структуру.
Folge : эти программы управляются с помощью автоматизированного внешнего устройства и могут быть вызваны только автоматом.
Up : Sub с движением, которое может быть вызвано только из той или иной Up Folge
Makro : Sub нет движения, которое можно вызвать из Folge, Up или другого Makro.
С этой системой мы теряем способность вычислять базы
Это можно было бы решить по-разному с тремя точками, определенными в базе данных, и рассматривать их так, как если бы они были внешним инструментом.
После вычисления инструмента мы вычисляем точку на любую точку базы для вычисления, и полученные декартовы координаты будут этой конкретной точкой.
В итоге
Система VKRC2 быстрее программируется, но теряет эффективность для приложений, требующих специального программирования.
Это система, созданная для работы с определенным стандартом, который установлен
Система KRC2 дает больше возможностей для программирования, все возможности открыты, и это важно для объектов, которые сильно отличаются друг от друга.
Во всяком случае, программирование в экспертном режиме абсолютно одинаково для обеих систем, и как характеристики производительности, так и обработка и конечные результаты идентичны.
Это тот же робот, который может планировать один из двух способов:
VKRC2 быстрее.
KRC2 более универсален.
Области применения роботов
- Поддержка прессы
- Погрузка и разгрузка деталей
- Обработка
- Обработка деталей
- Дуговая сварка
- Точечная сварка
- Паллетирование
- Лазерная сварка Nd-Yag
- Склеивание - склеивание
- Сварка шпилек
Информация о роботе:
- Максимальная загрузка робота: 150/180 / 210Kg.
- Максимальный охват: 2700/2900/3100 мм.
- Повторяемость: 0,15-0,2 мм.
- Контроллер: версия программного обеспечения VKR C2 3.3.4
Скорость движения робота:
- Ось 1: 105º/сек.
- Ось 2: 110º/сек.
- Ось 3: 95º/сег
- Ось 4: 170º/сек.
- Ось 5: 170º/сек.
- Ось 6: 238º/сек.
Приложения для роботов:
- обработка
- Уход за машиной
- Полировка, шлифовка и удаление заусенцев
- Покрытие и склеивание
- обращение
- Измерение и тестирование
- сборочный
- Паллетирование и сбор заказов
- резка
- сварка



{kind=link}
{kind=link}
{kind=link}