When a robot operates without a vision system, the working environment must be configured and the robot must always access a predefined location, forcing it to employ high-precision positioning systems for the things to be handled so that the robot go to the exact location.
Due to the fact that vision systems allow to establish the position of any element in space with exceptional precision, being able to specify each point in a 3D space and directing the robot to the exact place where it should go, vision-assisted robotic systems are much more adaptable.
These types of guide systems can be used in applications such as welding, painting, riveting, assembly, palletizing and depalletizing, as well as item or component handling environments.
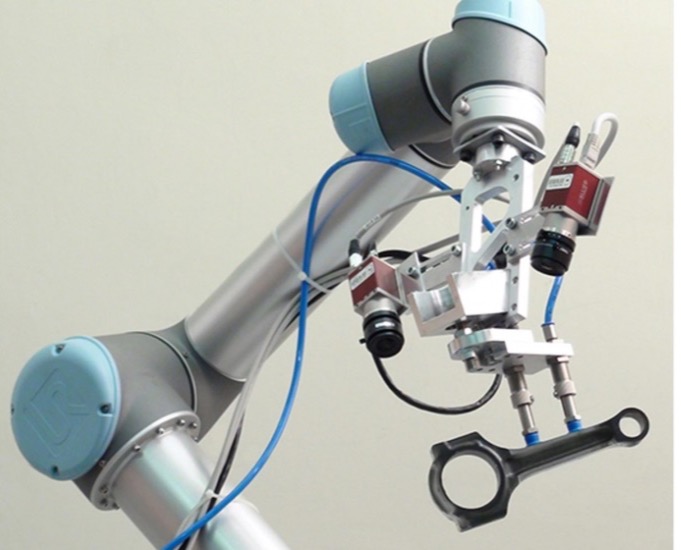
Multiple vision systems are used for identification and determination of position, ranging from mono-digital camera systems and artificial vision that allow recognition and position on a 2D plane to stereo systems, laser triangulation and time of flight, which allow three-dimensional recognition and precise position.
Pick and place systems typically consist of a camera and a robot, but it is not unusual to discover systems that coordinate many cameras and robots to complete the entire process of picking and disposing of goods at their final destination as quickly as possible. .
However, what suggests a real challenge for this technology of vision systems and artificial intelligence is undoubtedly the Bin Picking process.
Bin Picking is a Vision Guided Robotics (VGR) system that employs a vision system and a robotic picking system to recognize and locate items and subsequently relocate, to randomly pick and retrieve stacked pieces from a bin.
The identification of the object to collect is the first step in the Bin Picking process. So exact information in three dimensions of the article is required. Since a piece can be presented in any location in the space in an environment that looks mixed and together. The Bin Picking program must know the part in three dimensions. Thus, all the shape or contour parameters associated with the item must be entered into the system beforehand.
The Bin Picking system must determine the field of vision where the piece to be picked is placed, in this example the container where the stacked objects are stored, once the piece to be selected is defined. Knowing the structure of the object and the context it is in, the next step is to recognize and choose things within the container.
Through a complex algorithm, it selects an object that meets an accessible position, free of collisions, is not imprisoned by other parts and is also the best among the other options.
Once the element has been determined, the robot must reach it in the shortest possible time, avoiding colliding with the work area or with other pieces, for which the best route must be planned.
Once the trajectory has been described and the element has been reached, the clamping must be clean, so the ideal gripper will have been previously designed for the type of element with which it is working, the viable grip factors of said element can be determined and therefore Finally, the grab tool will be positioned in such a way that it can grab the object and place it in the previously chosen area.
There are programs that carry out quality control through artificial vision systems during the process path.
As a result, Vision Guided Robotics (VGR) is not only enabling robotics to be a quality process, it is opening up this technology to a wide range of industry and service process suggestions and also giving robotics a boost by expanding the number of robots that can be installed in one or more processes of a manufacturing line.
If you need more information, don’t hesitate to contact us: we will be ready to help you and discover the best solution for your project.